Learning to Plan & Schedule with Reinforcement-Learned Bimanual Robot Skills
CoRL 2025 @ Learning Effective Abstractions for Planning
LOTUS: Continual Imitation Learning for Robot Manipulation Through Unsupervised Skill Discovery
ICRA 2024
Abridged in CoRL 2023 @ Deployable, Oral Presentation
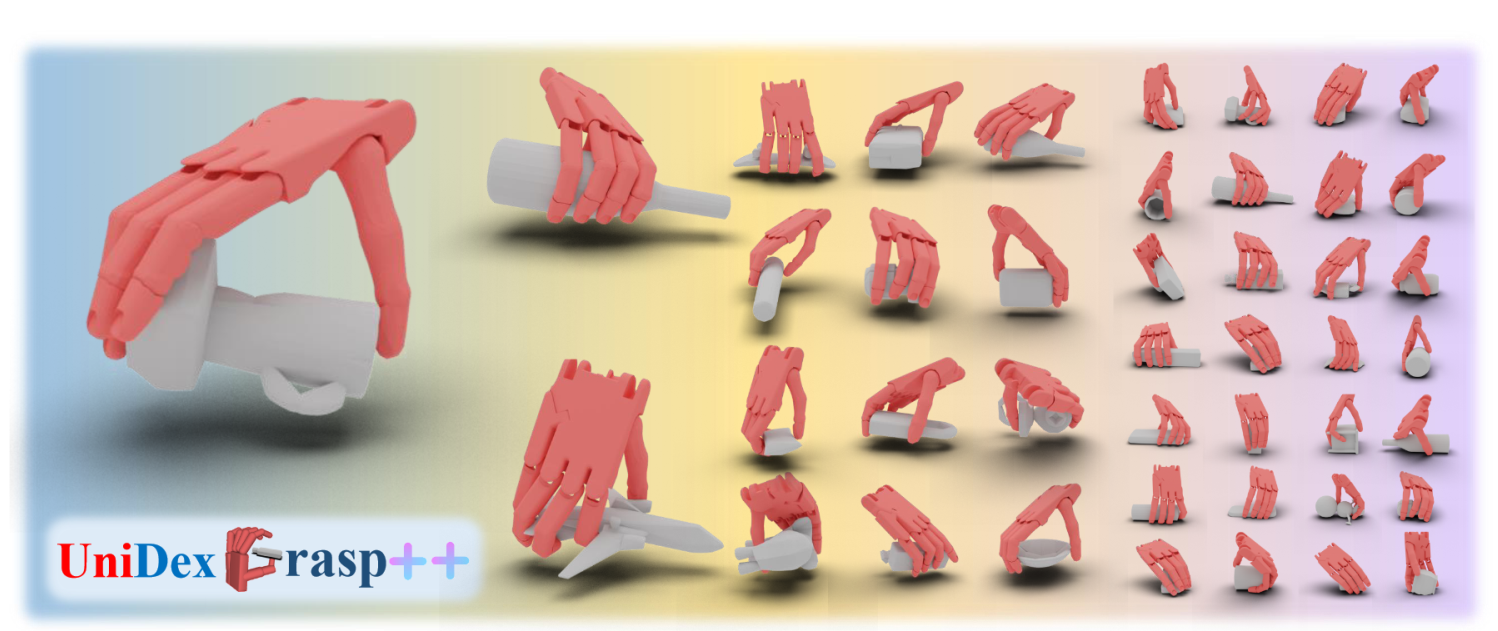
UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
ICCV 2023 Best Paper Finalist
Oral Presentation, Best Paper Finalist (Top 0.2% of submissions)
Learning Category-Level Generalizable Object Manipulation Policy via Generative Adversarial Self-Imitation Learning from Demonstrations
RA-L & IROS 2022
1st place winner of SAPIEN ManiSkill Challenge 2021 (ICLR 2022 Challenge Track)